Jak udělat roboty chytřejší spojením lidské a strojové mysli
Startup Kindred AI učí roboty nové úkoly využitím virtuální reality. Konečným cílem je vytvořit nový druh umělé inteligence.
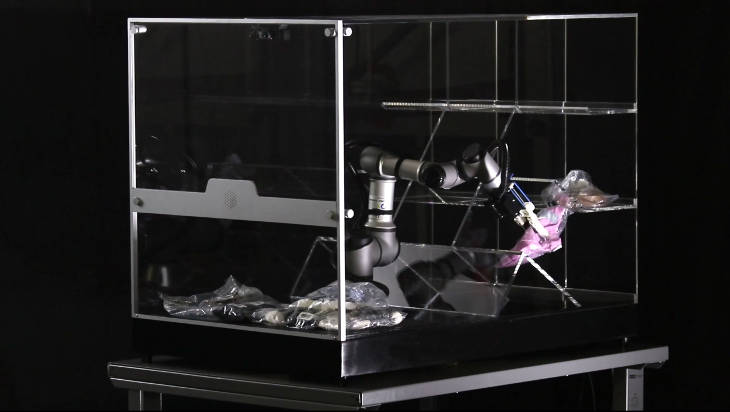
Když se rameno robota učí, jak uchopit různé předměty, čas od času se přepne na řízení lidským operátorem.
Kanadský startup Kindred AI trénuje roboty k provádění náročných specializovaných úkonů tak, že je propojí s lidskými "piloty" vybavenými brýlemi pro virtuální realitu a ovladačem. Cílem je, aby si roboty tyto úkony osvojily tak dokonale, aby je pak byly schopny provádět samostatně a rychleji než člověk. Takto by lidé mohli v budoucnu fungovat v synchronizaci se stroji, kdy k zesílení schopností automatizovaných systémů bude využíváno schopností lidských operátorů. Přes všechny obavy, že roboty a umělá inteligence vezmou lidem práci, existuje pořád spousta věcí, které stroje zatím dělat nemohou.
Kindred AI tvrdí, že plánuje v následujících měsících spustit produkt zaměřený na maloobchodníky. Dlouhodobé ambice jsou však mnohem vyšší. Společnost doufá, že toto člověkem podporované učení přispěje k rozvoji nového a výkonnějšího druhu umělé inteligence. Kindred založilo několik lidí z firmy D-Wave, společnosti zaměřené na kvantové počítače se sídlem v kanadském Burnaby.
Pilot může vidět, slyšet a cítit to, co vidí, slyší a cítí robot.
Kindred v současné době testuje konvenční průmyslové roboty, které jsou schopny uchopovat a pokládat předměty ošemetné na manipulaci jako drobné kusy oblečení, a to rychleji a spolehlivěji, než by bylo normálně možné. Paže robota to řeší tak, že si občas vyžádá pomoc od týmu lidí, kteří díky nástrojům virtuální reality mohou vidět v čem je problém a převzít dočasně kontrolu. "Pilot může vidět, slyšet a cítit to, co vidí, slyší a cítí robot. Robot je tedy v podstatě ovládán tím, co pilot ve virtuální realitě provádí," říká Geordie Rose spoluzakladatel a generální ředitel Kindred AI, který předtím také spoluzaložil D-Wave. "To nám umožňuje robotům ukázat, jak se chovat jako lidé. Lidé nejsou nejrychlejší ani nejlepší ve všech aspektech řízení robotů, jako v případě ukládání věcí na určitá místa. V řešení složitých či nepředvídatelných situací jsou však stále nepřekonatelní."
reklama
Systém firmy Kindred používá několik algoritmů strojového učení a snaží se předpovědět, zda některý z nich poskytne požadovaný výsledek, například uchopení předmětu. Pokud se zdá, že ani jeden z algoritmů nenabízí vysokou pravděpodobnost úspěchu, zavolá na pomoc lidského operátora. A co je nejdůležitější, algoritmy se z akcí lidských operátorů učí. K dosažení tohoto cíle společnost používá formu učení posilováním (anglicky reinforcement learning), přístup, který zahrnuje experimentování a posílení chování, které vede k danému cíli.
Rose říká, že systém může uchopit drobné oděvy přibližně dvakrát rychleji než člověk. Pro samostatné nasazení je však příliš nespolehlivý. Lidský operátor nicméně zvládne provozovat až několik robotů najednou.
Učení posilováním (anglicky Reinforcement Learning)
Reinforcement learning je oblast strojového učení inspirovaná behaviorální psychologií. Zabývá se tím, jak by se softwaroví agenti měli v daném prostředí chovat tak, aby maximalizovali takzvanou kumulativní odměnu. Problém je kvůli jeho obecnosti studován v mnoha dalších oborech, jako například teorie her a teorie řízení. V některé literatuře se také nazývá Adaptivní dynamické programování.
Více na české Wikipedii pod pojmem: Zpětnovazební učení.
Rose dodává, že Kindred zkoumá nejrůznější systémy HITL (z anglického Human-in-the-loop tedy Člověk ve smyčce) poskytujících kontrolu nad humanoidním robotem, od těch, kde člověk jednoduše klikne na obrázek, aby ukázal robotovi, kde něco uchopit, až po exoskeletony, do kterých se člověk může obléct. Piloti se obvykle naučí řídit vzdálený robotický systém efektivně. "Používání ovládacího zařízení je zpočátku značně frustrující, lidská mysl je ale velmi plastická a brzy se přizpůsobí," říká Rose.
Technickou inspirátorkou pro tuto technologii je Suzanne Gildert, která byla dříve vedoucím výzkumným pracovníkem ve společnosti D-Wave, a která je nyní vědeckou ředitelkou Kindred AI. Společnost působila několik let v utajeném režimu, do té doby, než se na světlo online světa dostaly podrobnosti o patentu, který Suzanne Gildert podala, a který popisuje schéma pro kombinování různých tele-operačních systémů se strojovým učením. Zdá se, že technologické vize firmy Kindred značně přesahují rámec šikovnějších třídicích robotů.
reklama
"Púvodní představa spočívala v tom, že pokud by se to dalo dělat dostatečně dlouho a byl k dispozici nějaký druh umělé inteligence pro učení na pozadí, pak by se mohlo vyzkoušet mnoho různých modelů umělé inteligence a zjistit, který z nich trénuje lépe," říká Gildert. "Nakonec mě napadlo, že pokud člověk dokáže demonstrovat vše prostřednictvím robota, potom není důvod, aby se robot nemohl naučit být velmi lidský."
Nejvíce pozornosti vzbudil patent, ve kterém Kindred popisují možnost, kdy tyto systémy mohou být ovládány dokonce zvířaty, jako jsou opice. Gildert říká, že to byl spekulativní nápad, a že žádné opice nejsou v současné době společností zaměstnávány. Nicméně, dodává, že společnost má robotickou kočku vyškolenou pomocí učení posilováním, která se potuluje po jejich kancelářích.
Člověk ve smyčce (anglicky Human in the loop, zkráceně HITL)
V oblasti modelování a simulací je HITL definován jako model, který vyžaduje lidskou interakci. V tomto typu simulace je člověk vždy součástí simulace a následně ovlivňuje výsledek takovým způsobem, jenž je obtížné, ne-li nemožné, přesně reprodukovat. Model HITL také snadno umožňuje identifikaci problémů a požadavků, které nemusí být snadno identifikovány jinými simulačními prostředky.
Human-in-the-loop neboli Člověk ve smyčce se často označuje jako interaktivní simulace, což je zvláštní druh fyzické simulace zahrnující lidské operátory, například v leteckých simulátorech nebo v simulátorech jízdy.
U Kindred je také trochu neobvyklé, že jeho zakladatelé jsou vzděláním fyzici, a ne robotici nebo počítačoví vědci. Rose však tvrdí, že to nabízí jedinečnou a cennou perspektivu. "Pro počítačové vědce je čára mezi simulací a reálným světem někdy rozmazaná," říká. "My preferujeme dělat věci, které děláme v reálných robotech a v reálném světě."
Zdá se, že přístup, o který se KINDRED snaží, má obrovský potenciál. Ken Goldberg, profesor na Kalifornské univerzitě v Berkeley, který se specializuje na strojní učení a robotiku, říká, že čerpáním z lidských dovedností se učení robotů dramaticky urychlí. Goldberg, který mimo jiné pracuje na podobném přístupu v oboru robotické chirurgie, dodává, že snaha vyvíjet roboty učící se od lidí je velmi aktivní oblastí výzkumu. "To je v podstatě to, co věřím, že je velká příležitost v robotice," říká Goldberg. "Možnost využití lidské demonstrace znamená obrovský přínos."
Technické výzvy spojené s učením robotů využívajícím dálkovou interakci s člověkem však nejsou primitivní. Sangbae Kim, profesor na MIT, který pracuje na dálkově řízených humanoidních robotech, říká, že mapování lidského řízení na činnost stroje je neuvěřitelně komplikované. "První výzvou je monitorování lidského pohybu připojením pevných vazeb na lidskou pokožku. To je velice obtížné, protože jsme tvorové s vnitřní kostrou tzv. endoskeletonem, "říká Kim. "Ještě větší výzvou je skutečně pochopit všechny detaily jednotlivých kroků rozhodovacích procesů u lidí, z nichž většina se děje podvědomě."
Všechny živé bytosti dodržují určité vzorce chování a jednání. Snažíme se stavět stroje, které respektují stejné principy.
Zakladatelé společnosti KINDRED se těmito výzvami však odradit nenechají. "Naším cílem je dekonstruovat poznávání," říká Rose. "Všechny živé bytosti dodržují určité vzorce chování a jednání. Snažíme se stavět stroje, které respektují stejné principy."
Zdroje a odkazy
How a Human-Machine Mind-Meld Could Make Robots Smarter technologyreview.com
The Gap Is Testing the Kindred Sort Robotic Arm I Fortune youtube.com
Kindred AI: Daily Planet youtube.com
Suzanne Gildert on Kindred AI: Non-Biological Sentiences are on the Horizon youtube.com
{kind=link}